This repository contains daily 36 km Soil Moisture (SM) and vegetation optical depth (L-VOD) retrievals from the SMAP-INRAE-BORDEAUX or SMAP-IB VERSION1. Presently, only SMAP-IB SM and L-VOD products acquired from the descending (06:00, local overpass time) orbits are available from https://ib.remote-sensing.inrae.fr/.
The SMAP-IB, a new 2-Parameter (2-P, i.e., SM and L-VOD) retrieval algorithm recently developed by INRAE Bordeaux (Li et al., 2022), relies on the mono-angle and dual-polarized TB observations from SMAP. As for our SMOS-IC product Version 2, SMAP-IB is based on the L-MEB (L-band Microwave Emission of the Biosphere) model to simultaneously retrieve SM and L-VOD and it is based on the soil and vegetation parameters developed for SMOS-IC (Fernandez-Moran et al., 2017; Wigneron et al., 2021). SMAP-IB incorporates the main characteristics of SMOS-IC: it does not use any modelled SM or vegetation data estimated from optical observations as input to the algorithm or to initialize the model inversion. To cope with the under-determined problem caused by the use of the (strongly correlated) dual-polarization SMAP TB observations in the 2-P retrievals, SMAP-IB imposes constraints on both SM and L-VOD based on previously retrieved values to initialize the corresponding retrievals. Inter-comparisons with other products (SMOS-IC, MT-DCA, and the new versions of SMAP SCA-V and DCA) have found that the SMAP-IB soil moisture product outperforms SMOS-IC and MT-DCA and can achieve similar performance to SCA-V and DCA (Li et al., 2022; Zheng et al., 2022).
In particular, SMAP-IB SM retrievals present the higher scores (R = 0.74) of all products in capturing the temporal trends of in-situ observations from ISMN (International Soil Moisture Network). SMAP-IB SM retrievals present best scores for R, ubRMSD (~ 0.058 m3/m3) and bias (0.002 m3/m3) when considering only products independent of optical vegetation indices.
Moreover, in terms of vegetation monitoring, the SMAP-IB L-VOD product was found to have the best spatial correlation with aboveground biomass and tree height. SMAP-IB L-VOD does not show obvious saturation like the L-VOD datasets that incorporate optical information in the algorithms (i.e., SCA-V and DCA). More details about the SMAP-IB algorithm can be found in Li et al. (2022).
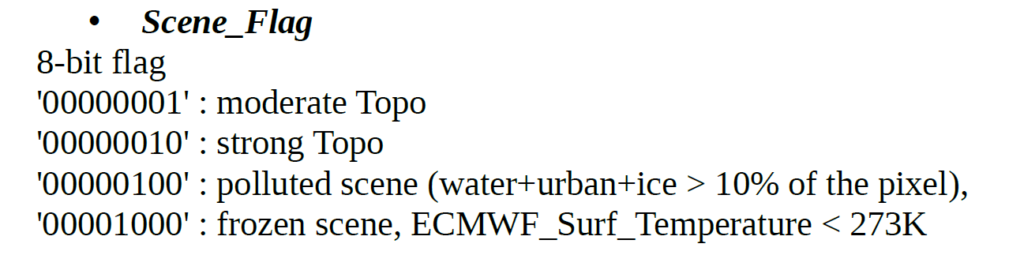
Before doing any application or validation studies, the quality control of the data should be done carefully. For the data filtering, we just need to use Scene_Flags (SF) and the standard error layers of the corresponding retrievals.
Firstly, we usually filter the daily SM/VOD values by the conditions “SF <= 1” to remove pixels including ‘strong Topography’, ‘frozen scenes’ and ‘polluted scenes’. Then, we use “Soil_Moisture_StdError” <= 0.05 and “Optical_Thickness_Nad_StdError” <= 0.05 to remove noisy retrievals. This standard error threshold can be higher or lower, but a higher value will reduce the quality of the SM/VOD, and a lower value will mask out too many daily observations; this value depends on your application and is not mandatory (we are investigating it more in depth currently).
Data Format:
lat:latitude
lon:longitude
RMSE: RMSE between measured TB and modeled TB
Scene_Flags: Scene Flags
Skin_Temperature_ECMWF: ECMWF Skin Temperature
Optical_Thickness_Nad: Vegetation optical depth
Optical_Thickness_Nad_StdError: Vegetation optical depth standard error
Soil_Moisture: Soil Moisture
Soil_Moisture_StdError: Soil Moisture standard error
Soil_Temperature_Level1: ECMWF Soil Temperature at surface level 1
TIME_UTC: MATLAB ‘datenum’ storage format and can be converted to points in time through: datetime(TIME_UTC,’ConvertFrom’,’datenum’,’Format’,’yyyy-MM-dd HH:mm:ss.SSS’)
All data are saved in ‘netcdf4’ format as 64-bit DOUBLE point numbers in NetCDF format on a global EASE Grid (Equal Area Scalable Earth) version 2, with a sampling resolution of 36 km. Each file contains a 406 by 964 entry map.
Note:
*the normal range of VOD values is [0, 2], and SM is [0,1];
*negative yearly median VOD/SM values, are not physical values and were set equal to zero (mostly distributed in the Sahara Desert and Central Australia);
Citation of the following papers is required when you use the SMAP-IB product:
Li, X., Wigneron, J.P., Fan, L., Frappart, F.,Simon H.Y., Colliander, A., Ebtehaj A., Gao L., Fernandez-Moran R., Liu X.Z., Wang M.j., Ma H.l., Moisy C., Ciais P. (2022). A new SMAP soil moisture and vegetation optical depth product (SMAP-IB): Algorithm, assessment and inter-comparison. Remote Sens. Environ. 271, 112921. https://doi.org/10.1016/j.rse.2022.112921
Wigneron, J.P., Li, X., Frappart, F., Fan, L., Al-Yaari, A., De Lannoy, G., Moisy, C. (2021). SMOS-IC data record of soil moisture and L-VOD: Historical development, applications and perspectives. Remote Sens. Environ. 254, 112238. https://doi.org/10.1016/j.rse.2020.112238
Questions?
Email jean-pierre.wigneron@inrae.fr or xiaojun.li@inrae.fr