SMOS IC
Version 1, date 09/09/2017
Version # Date Comments
1.a 02/03/2017
1.b 22/05/2017
1.c 30/05/2017 Flags adjusted
1.d 09/09/2017 v105
Version 2.0, date 01/07/2020 v2
Product Version = V.2.0
Brief introduction:
This repository contains daily Soil Moisture (SM)/vegetation optical depth (VOD) retrievals from the SMOS-IC VERSION 2.
Since the release of the first version V105, several improvements have been applied to the SMOS-IC algorithm, leading to the production of the version 2 (V2), based on a collaboration between INRAE and China Scholarship Council. A major improvement concept is based on the fact that VOD has low time variations over short time periods (Tian et al., 2018; Wigneron et al., 2000, 2007), which was not considered in V105. To implement this concept, the optimization processing of VOD_init (a priori information on VOD) to constrain the retrievals has been modified in SMOS-IC V2: to retrieve VOD at a date t, previously retrieved VOD values (over a period of 10 days before date t) are used to initialize the first guess value of VOD (VOD_init) in the cost function. Readers are referred to Wigneron et al., 2020 (RSE, Submitted) for more detailed description of the SMOS-IC V2 retrieval algorithm. It should be noted that the improvements in SMOS-IC V2 are obvious for both SM and VOD. An in-depth analysis and inter-comparison between L-VOD products and other frequency VOD can refer to Li et al., 2020 (RSE, in press).
Before any application or validation step, applying quality control of the data is very important. For the data filtering, we only need to use Scene_Flags (SF) and TB-RMSE layers.
Firstly, we usually filter the daily SM/VOD values by the conditions “SF <= 1” to remove ‘Strong Topography’, ‘frozen’ scene and ‘contaminated’ scene (urban + ice + water bodies).
Then, we use TB-RMSE <= 6K or 8k to remove strong RFI impacts (this TB-RMSE threshold can be high or low, but a higher value will reduce the quality of the SM/VOD data, and a lower value will mask out too many daily observations); this value depends on your application, usually for global scale validation, we choose 6K for VOD and 8K for SM. Based on these criteria, most of, but not all, RFI events will be filtered out. Dynamic maps and or time variations in TB-RMSE (for ASC, DEC, delta (ASC, DESC), Cf Wigneron et al., 2020) can be useful to detect/ filter out RFI in a more accurate way.
Naming convention
example :
SM_OPER_MIR_CDF3SA_20160726T000000_20160726T235959_105_001_8.DBL.nc
SM : SMOS
OPER : OPER or REXX, depends if SMOS L3 brightness temperatures are from the operational
or reprocessing campaign
MIR : MIRAS SMOS instrument
CDF3SA/CDF3SD : Catds Daily, Full polarization, level 3, Smosic, Ascending/Descending orbits
20160726 : Tag for the day as 4 digit year, 2 digit month, 2 digit day
000000 & 235959 : time window, as HHMNSS, means all orbits of the day are considered
105 : version of the SMOS IC product
001 : file counter
8 : processing site, 8 stands for Cesbio
DBL.nc : DataBLock, nc is the extension for netcdf format
Data Format:
All data are saved in ‘netcdf4’ format as 64-bit DOUBLE point numbers in NetCDF format on a global EASE Grid (Equal Area Scalable Earth) version 2, with a sampling resolution of 25 km. Each file contains a 584 by 1388 entry map.
Days:Number of Days since 1/1/2000
lat: latitude (°)
lon: longitude (°)
TB-RMSE: RMSE between measured TB and modeled TB (K)
Scene_Flags: Scene Flags
8-bit flag
- 00000001 : moderate Topo
- 00000010 : strong Topo
- 00000100 : polluted scene (water + urban + ice > 10 % of the pixel)
- 00001000 : frozen scene, ECMWF_Surface_Temperature < 273 K
Skin_Temperature_ECMWF: ECMWF Skin Temperature (K)
Optical_Thickness_Nad: Vegetation optical depth
Optical_Thickness_Nad_StdError: Vegetation optical depth standard error
Soil_Moisture: Soil Moisture
Soil_Moisture_StdError: Soil Moisture standard error
Soil_Temperature_Level1: ECMWF Soil Temperature at surface level 1
UTC_Microseconds: Microseconds
UTC_Seconds: Number of Seconds
Note to convert Days/Sec/MicroSec with matlab: > time = 730486 + Days + UTC_Seconds/86400 ;
Data Filtering
1) RFI filtering
RFI Filtering depends on application. VOD is more sensitive to RFI than SM.
The lower the value of TB-RMSE, the higher the quality but they ‘ll be less numerous.
So,
-for VOD applications: TB-RMSE should be <= 4K (very strict), 6K (recommended) or 8K.
-For SM applications TB-RMSE should be <= 6K or 8K (recommended) or 10K
2) Range of values
-the normal range of VOD values is [0, 2], and SM is [0.0 m3/m3, 1 m3/m3].
Daily SM / TAU values can be slightly negative. This is expected from the point of view of the minimization process. But daily negative values are not physically significant and should be set equal to zero.
Daily negative values were not set to zero here as they can be used to compute yearly average. After yearly averaging, negative yearly median VOD/SM values, should be set equal to zero. These values aremostly distributed in the Sahara Desert and Central Australia;
So, except for specific analysis, consider the valid range of SM values is [0.0 m3/m3, 0.6 m3/m3]
(maximum value depends on soil saturation)
Input Data:
Since March 1, 2020, we have started to use public unfiltered TB from CATDS (version: OPER) as input instead of the previous version RE06, as the former is easier to obtain in real time. We did not find any discontinuities yet (see Figure 1). Before March 1, 2020, we used non-public unfiltered CATDS TB data
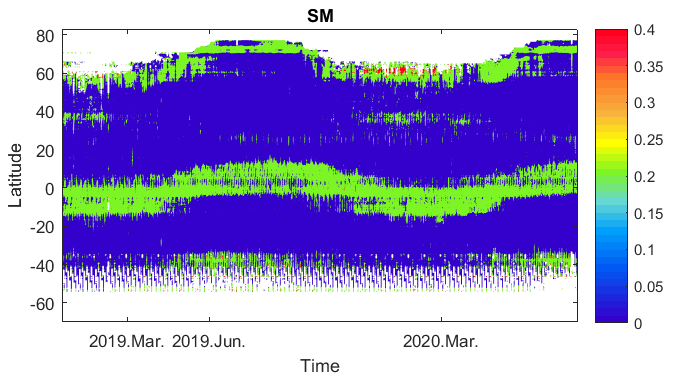
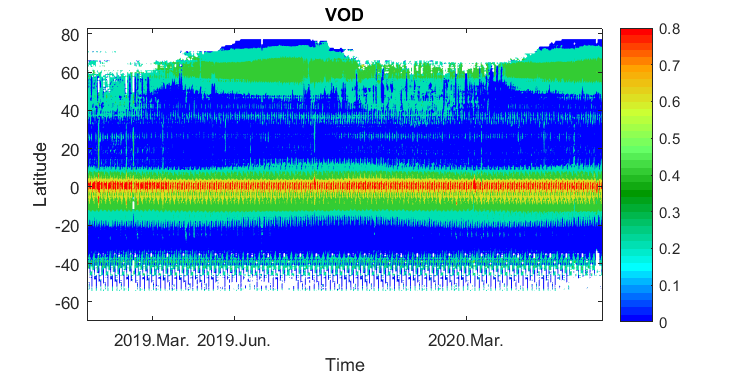
Figure 1: Zonal average of SM (top) and VOD (bottom) from SMOS-IC Version 2 from 01/2019 to 06/2020.
– Land cover map: IGBP
– T vegetation = T skin (ECMWF ERA-interim)
– T soil = function (T_Layer-1, T_Layer-3) (ECMWF ERA-interim)
Other Notes: – The retrieval is attempted with incidence angles between 20° and 55°, angle separation of 10°
References for citations:
Version 105
Fernandez-Moran, R., Al-Yaari, A., Mialon, A. , Mahmoodi, A , Al Bitar, A. , De Lannoy, G.,
Lopez-Baeza, E., Kerr, Y., Wigneron, J.-P., 2017. SMOS-IC: An alternative SMOS soil moisture and vegetation optical depth product, Remote Sens., 9, 457; doi:10.3390/rs9050457
Fernandez-Moran, R., Wigneron, J.-P., De Lannoy, G., Lopez-Baeza, E., Parrens, M., Mialon, A., Mahmoodi, A, Al-Yaari, A., Bircher, S., Al Bitar, A., Richaume, P, Kerr, Y., 2017. A new calibration
of the effective scattering albedo and soil roughness parameters in the SMOS SM retrieval
algorithm, accepted International Journal of Applied Earth Observation and Geoinformation
Fernandez-Moran, R., Al-Yaari, A. , Mialon, A. , Mahmoodi, A , Al Bitar, A. , De Lannoy, G.,
Lopez-Baeza, E., Kerr, Y., Wigneron, J.-P., 2017. SMOS-IC: An alternative SMOS soil moisture and vegetation optical depth product, Remote Sens., 9, 457; doi:10.3390/rs9050457
Version 2:
Wigneron, J.-P., Li, X., Frappart F., Fan L., Al-Yaari A., De Lannoy G., Liu X., Wang M., Le Masson E., Moisy C., SMOS-IC data record of soil moisture and L-VOD: historical development, applications and perspectives, Remote Sens. Env., 254, 112238, https://doi.org/10.1016/j.rse.2020.112238, 2021.
[this article should be cited when using the SMOS-IC dataset]
Li, X. Wigneron J.-P., Frappart F., Fan L., Ciais P., Fensholt R., Entekhabi D., Brandt M., Konings A. G., Liu X., Wang M., Al-Yaari A., Moisy C., Global-scale assessment and inter-comparison of recently developed / reprocessed microwave satellite vegetation optical depth products, RSE, in press
Li X, Al-Yaari A, Schwank M, et al. Compared performances of SMOS-IC soil moisture and vegetation optical depth retrievals based on Tau-Omega and Two-Stream microwave emission models[J]. Remote Sensing of Environment, 2020, 236: 111502.
Li, X., Wigneron, J.-P., Frappart, F., Fan, L., Wang, M., Liu, X., Al-Yaari, A., Moisy, C., 2020. Development and validation of the SMOS-IC version 2 soil moisture product. In: IGARSS 2020-2020 IEEE International Geoscience and Remote Sensing Symposium. IEEE.
Questions?
Email jean-pierre.wigneron [at] inrae.fr or xiaojun.li [at] inrae.fr